- Location
- Sandy, Ut
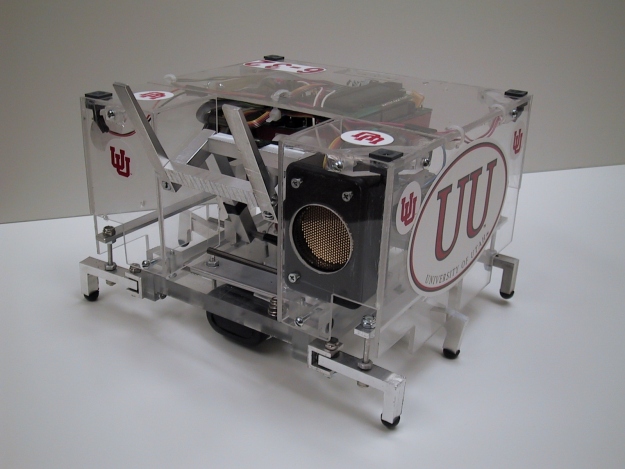
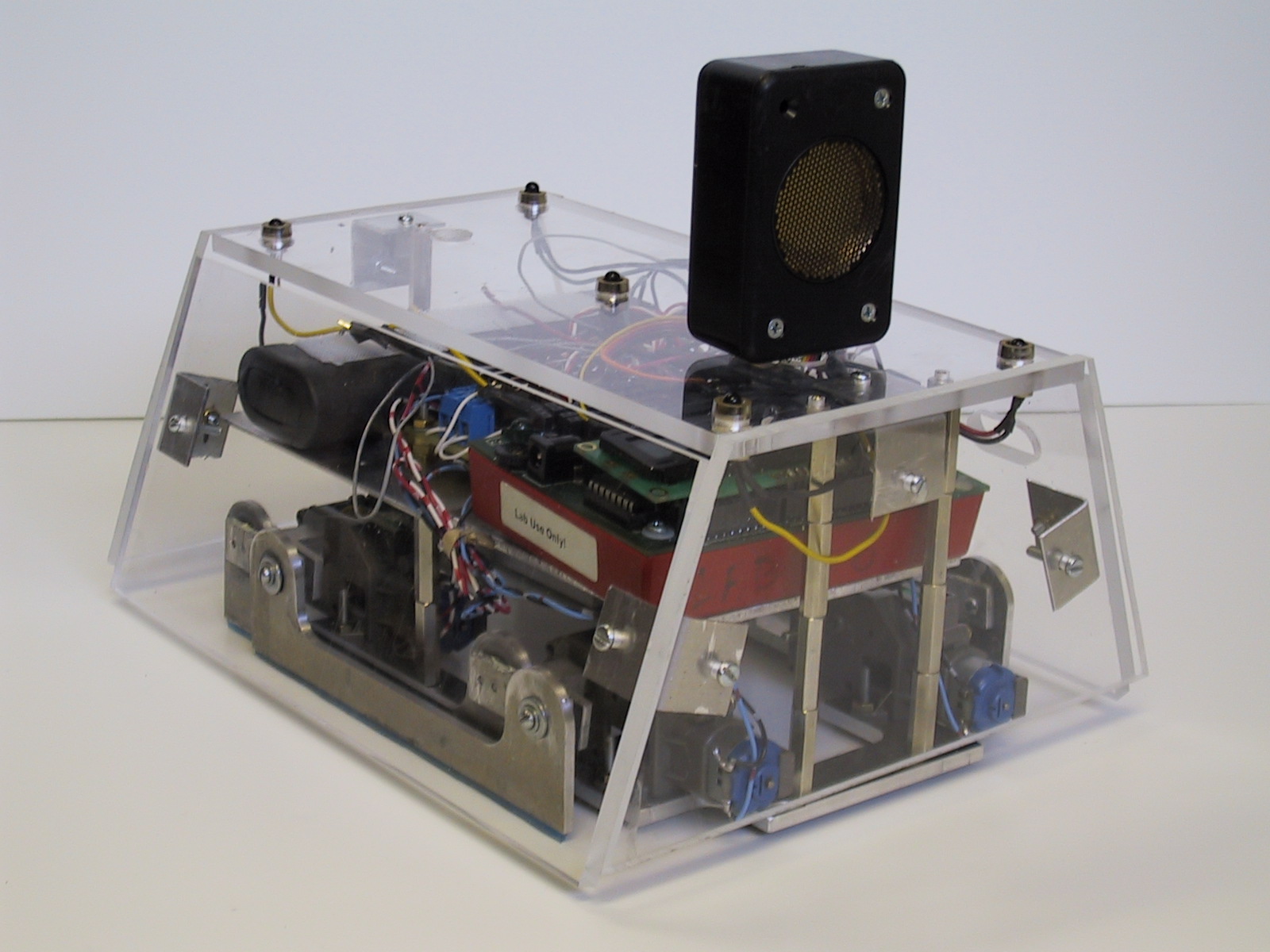
As some of you know, I am a Mechanical Engineering student at the U. As part of my classes, we are building a small robot to compete against other robots. It is required to walk (not roll, no tracks, etc) and it has to meet a series of specifications (weight, size, etc). On top of that, it is 100% automatic, meaning as a soon as we press the start button on the robot, it must seek the other robot using its own built in functions... Pretty geeky eh?
Here is a pic of our robot thusfar:
Here is a pic of our robot thusfar: